DIY Line Follower Robot without Microcontroller Circuit Diagram Components Required to Build a Line Follower Robot. Arduino Uno - 1Nos. L293D motor driver- 1Nos. IR sensor module -2 Nos. 7.4 or 9V battery -1 Nos. BO motor - 2 Nos. A line following robot is an autonomous robot designed to follow a visible line drawn on the ground. It uses infrared (IR) sensors to detect the line and follow it. In this tutorial, we will guide you step by step to create a line follower robot using Arduino. A line follower robot is an autonomous robot designed to detect and follow a line, typically a black line on a white surface. How Does It Work? To enable the line-following functionality in a robot, we need a mechanism to detect the line it will follow.

Autonomous Line Follower Robot Using Arduino: In this instructable, I will teach you how to make a line follower robot using Arduino, which is a very common microcontroller board. The robot will use two infrared proximity sensors to detect the line and on the basis of input received from the se…
Autonomous Line Following Robot : 4 Steps Circuit Diagram
A line follower robot or LFR is an autonomous guided robot designed to follow a path or line, typically a black line on white surface. These robots are used in industrial automation, warehouse logistics, and educational purposes. In this guide, we'll show you how to build a line follower robot using Arduino and an L293D motor driver shield.
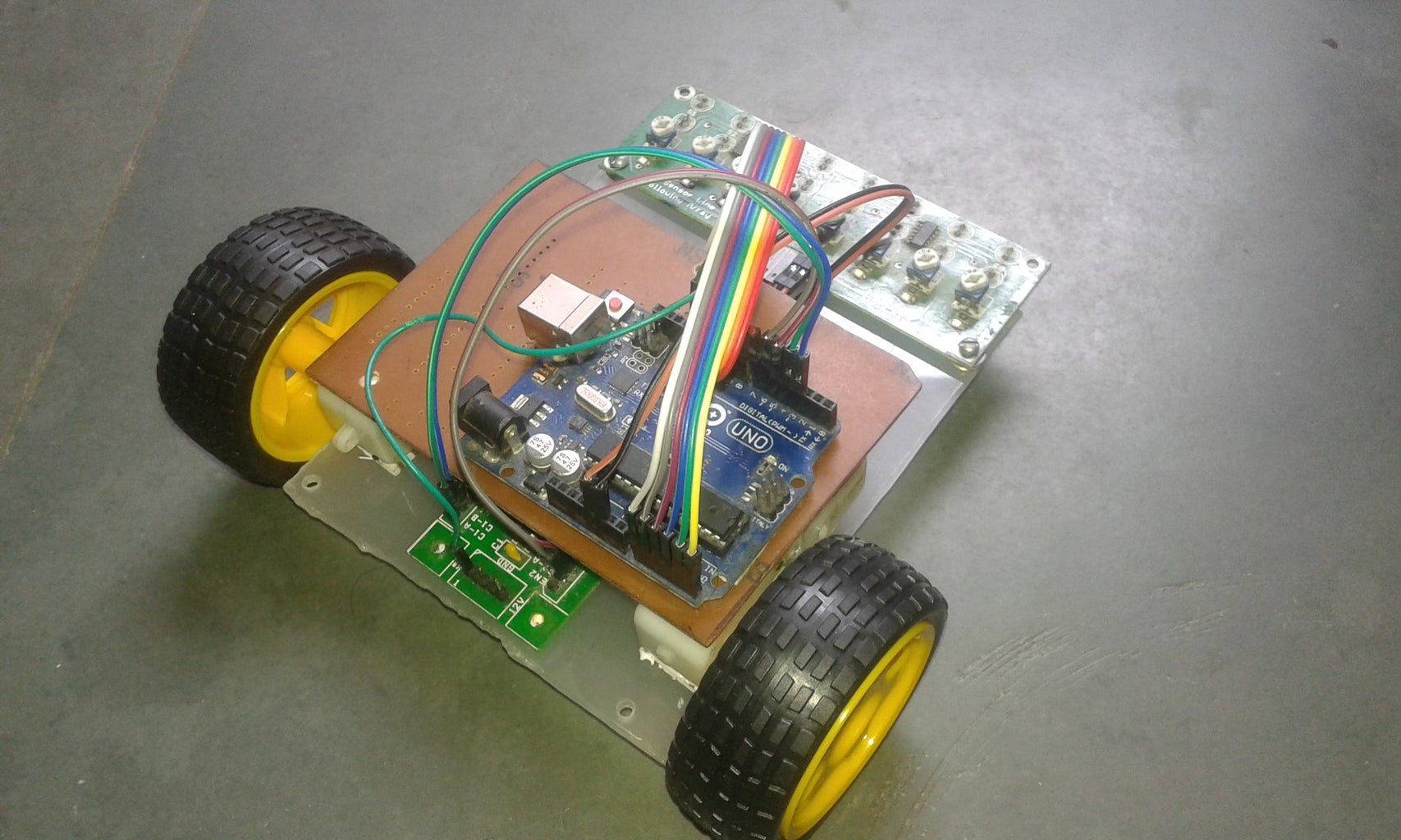
Assembling the Arduino-based Line Follower Robot. Now we understand all the connections, we can start assembling our robot. We have explained the step-by-step process of assembling the robot in the video provided at the end.. Step 1 To build the robot, first you'll need a chassis. Here we are using readymade chassis. Then solder all the four motors with at least 15 cm wires.

Building a Line Follower Robot Using Arduino UNO Circuit Diagram
As it says Autonomous robot, it doesn't require human intervention. To be simple it thinks on its own and executes the process based on its coding script, in our case it follows the line. We use infrared transmitter and receivers to detect the black line along with motor driver modules and Arduino to build a line following robot. the process of
